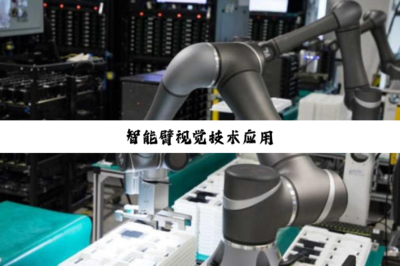
智能臂視覺技術(shù)在計算機信息科技領(lǐng)域的應(yīng)用與開發(fā)
隨著計算機信息科技的飛速發(fā)展,智能臂視覺技術(shù)作為人工智能與機器人技術(shù)的重要分支,正逐漸滲透到工業(yè)、醫(yī)療、服務(wù)等多個領(lǐng)域。本文將探討智能臂視覺技術(shù)的核心原理、應(yīng)用場景及其在計算機信息科技中的開發(fā)趨勢。
一、智能臂視覺技術(shù)概述
智能臂視覺技術(shù)結(jié)合了計算機視覺、傳感器技術(shù)和機械臂控制,使機器人能夠通過攝像頭或深度傳感器感知環(huán)境,識別目標(biāo)物體的位置、形狀和姿態(tài),并執(zhí)行精確的操作。其核心技術(shù)包括圖像處理、目標(biāo)檢測、三維重建和運動規(guī)劃等。在計算機信息科技的推動下,智能臂視覺系統(tǒng)通過深度學(xué)習(xí)算法(如卷積神經(jīng)網(wǎng)絡(luò))提升了識別精度和自適應(yīng)能力。
二、應(yīng)用場景
- 工業(yè)自動化:在制造業(yè)中,智能臂視覺技術(shù)廣泛應(yīng)用于裝配、焊接和質(zhì)量檢測。例如,汽車生產(chǎn)線上的機器人可以通過視覺系統(tǒng)定位零部件,實現(xiàn)高效組裝,減少人工誤差。
- 醫(yī)療手術(shù):在醫(yī)療領(lǐng)域,智能臂視覺輔助外科手術(shù)系統(tǒng)能夠?qū)崟r分析影像數(shù)據(jù),幫助醫(yī)生進行微創(chuàng)操作,提高手術(shù)精準(zhǔn)度和安全性。
- 物流與倉儲:在電商和倉儲管理中,智能臂結(jié)合視覺技術(shù)可實現(xiàn)自動分揀和包裝,通過識別貨物標(biāo)簽和形狀,優(yōu)化物流效率。
- 服務(wù)機器人:在家庭和服務(wù)行業(yè),智能臂視覺技術(shù)使機器人能夠識別物體并執(zhí)行任務(wù),如抓取物品或提供輔助服務(wù),提升用戶體驗。
三、技術(shù)開發(fā)趨勢
在計算機信息科技領(lǐng)域,智能臂視覺技術(shù)的開發(fā)正朝著智能化、集成化和實時化方向發(fā)展。邊緣計算和5G技術(shù)的應(yīng)用使視覺數(shù)據(jù)處理更快速,降低了延遲。多模態(tài)融合(如結(jié)合觸覺和聲音傳感器)增強了系統(tǒng)的感知能力。開源框架(如ROS和TensorFlow)的普及降低了開發(fā)門檻,促進了創(chuàng)新。未來,隨著量子計算和增強現(xiàn)實技術(shù)的進步,智能臂視覺有望在更復(fù)雜的環(huán)境中實現(xiàn)自主決策。
四、挑戰(zhàn)與展望
盡管智能臂視覺技術(shù)取得了顯著進展,但仍面臨挑戰(zhàn),如復(fù)雜環(huán)境下的魯棒性、數(shù)據(jù)隱私和成本控制。未來,通過跨學(xué)科合作和持續(xù)研發(fā),該技術(shù)有望在智能制造、智慧城市和太空探索等領(lǐng)域發(fā)揮更大作用。智能臂視覺技術(shù)作為計算機信息科技的關(guān)鍵組成部分,將持續(xù)推動產(chǎn)業(yè)升級和社會變革。
如若轉(zhuǎn)載,請注明出處:http://www.hefeihot.cn/product/14.html
更新時間:2026-01-20 14:51:41